Vérification du signal du bus CAN
- Câble utilisé
- Instructions de vérification
- Oscillographie de K-CAN, PT-CAN, F-CAN
- Ordre de mesure de la résistance avec la résistance correspondante K-CAN, PT-CAN et F-CAN
- K-CAN
- PT-CAN, F-CAN
- Note!
- Le bus CAN ne fonctionne pas
Ce manuel sert à vérifier que le signal de niveau haut du CAN et le niveau bas du signal CAN sont correctement transmis à la connexion de bus.
Câble utilisé
Câble multifonction
Instructions de vérification
- Test de tension (oscilloscope): Pour vérifier la tension, la batterie doit être connectée et le contact mis.
- Mesure de résistance: Lors de la mesure de résistance, il est nécessaire que l'objet à mesurer soit désexcité avant la mesure. Pour ce faire, la batterie est déconnectée. Attendez 3 minutes pour que tous les condensateurs du système se déchargent.
Informations CAN
Le bus CAN (Controller Area Network) est un système de bus série présentant les caractéristiques suivantes:
- la propagation du signal a lieu dans les deux sens.
- Chaque message est reçu par tous les abonnés du bus. Chaque abonné du bus décide s’il utilisera ou non le message.
- Des abonnés au bus supplémentaires sont ajoutés par une simple connexion parallèle.
- Le système de bus forme un système avec un conducteur. Chaque abonné au bus peut être un pilote ou un actionneur, selon qu'il soit connecté en émetteur ou en récepteur.
- Une connexion à deux fils est utilisée comme moyen de transmission. Désignations des fils: CAN bas et CAN haut.
- En règle générale, chaque abonné au bus peut communiquer via un bus avec tous les autres abonnés au bus. L'échange de données sur le bus est régi par les règles d'accès. La principale différence entre le bus de données K-CAN (bus CAN de la carrosserie), le bus PT-CAN (bus CAN du moteur et de la transmission) et le bus F-CAN (bus CAN du châssis) est la suivante:
- K-CAN: taux de transfert de données env. 100 Kbps Fil unique possible.
- PT-CAN: vitesse de transfert de données env. 500 Kbps Le mode simple fil n'est pas possible.
- F-CAN: taux de transfert de données env. 500 Kbps Le mode simple fil n'est pas possible.
Pilote: le pilote est un partenaire de communication actif à l'origine de l'initiative de communication. Le conducteur a la priorité et contrôle la communication. Il peut envoyer des messages à l'abonné au bus passif (actionneur) via le système de bus et, sur demande, recevoir ses messages.
Actionneur: l'actionneur est un élément de communication passif. Il reçoit une commande pour recevoir et transmettre des données.
Système avec périphérique maître: dans un système avec un périphérique maître, les participants à la communication peuvent à un moment donné assumer le rôle de maître ou d'actionneur.
Oscillographie de K-CAN, PT-CAN, F-CAN
Pour plus de clarté, que le bus CAN fonctionne parfaitement, vous devez surveiller la communication du bus. Dans le même temps, il n'est pas nécessaire d'analyser des bits individuels, il vous suffit de vous assurer que le bus CAN fonctionne. L’oscillographie indique: «Le bus CAN fonctionne évidemment sans perturbations».
Lors de la mesure avec un oscilloscope de tension, un fil de faible niveau et une masse CAN (ou CAN High) reçoivent un signal carré dans la plage de tension:
K-CAN:
Niveau CAN faible par rapport à la masse: U min = 1 V et U max = 5 V
Niveau CAN élevé par rapport à la masse: U min = 0 V et U max = 4 V
Ces valeurs sont approximatives et peuvent varier, en fonction de la charge du bus, jusqu'à 100 mV.
Réglages de l’oscilloscope pour la mesure sur le K-CAN:
CH1: sonde 1, rang 2 B / div; Connexion DC DC2: Probe 2, Grade 2 V / div; Temps de connexion CC: 50 ms / div
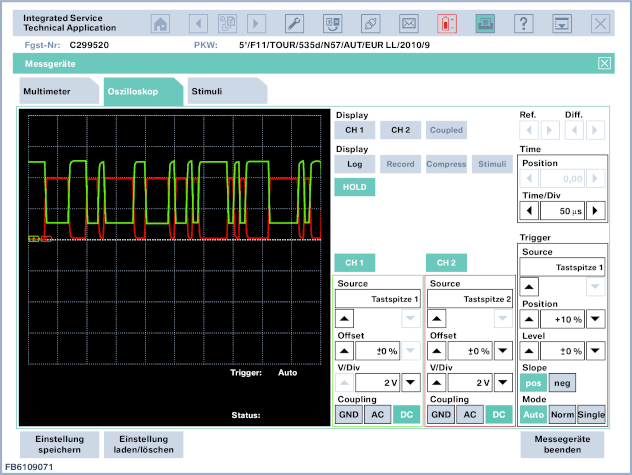
Fig. 1: mesure K-CAN: niveau CAN bas CH1, niveau CAN haut CH2
Lors de la mesure avec un oscilloscope de tension, un fil de faible niveau et une masse CAN (ou CAN High) reçoivent un signal carré dans la plage de tension:
PT-CAN et F-CAN
Niveau CAN faible par rapport à la masse: U min = 1,5 V et U max = 2,5 V
Niveau CAN élevé par rapport à la masse: U min = 2,5 V et U max = 3,5 V
Ces valeurs sont approximatives et peuvent varier, en fonction de la charge du bus, jusqu'à 100 mV.
Paramètres de l’oscilloscope pour la mesure PT-CAN (ou F-CAN):
CH1: sonde 1, rang 1 B / div; Connexion DC DC2: Probe 2, Grade 1 V / div; Temps de connexion CC: 10 ms / div 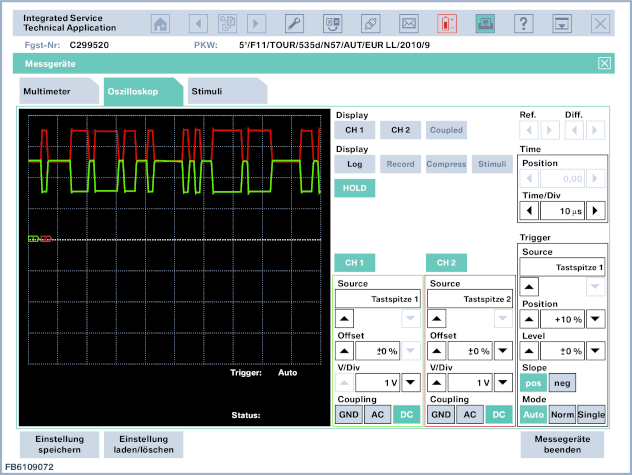
Figure 2: Mesure PT-CAN: CH1 Low CAN, CH2 High CAN
Ordre de mesure de la résistance avec la résistance correspondante K-CAN, PT-CAN et F-CAN
Le processus de vérification de la mesure de résistance:
- Le bus CAN doit être mis hors tension
- Aucun autre appareil de mesure ne doit être connecté (connexion en parallèle d'appareils de mesure)
- La mesure est effectuée entre les fils CAN bas et haut niveau.
- Les valeurs réelles peuvent différer des valeurs spécifiées de plusieurs ohms.
K-CAN
Une mesure de résistance séparée ne peut pas être effectuée sur le bus K-CAN, car la résistance varie en fonction de la logique de commutation de l'ordinateur!
PT-CAN, F-CAN
Pour éviter la réflexion du signal, deux abonnés au bus CAN (avec la distance maximale dans le réseau PT-CAN) sont chargés avec une résistance de 120 Ohm. Les deux résistances de charge sont connectées en parallèle et forment une résistance équivalente de 60 ohms. Avec la tension d'alimentation déconnectée, cette résistance équivalente peut être mesurée entre les lignes de données. De plus, les résistances individuelles peuvent être mesurées individuellement.
Instructions de mesure avec une résistance de 60 ohms: Déconnectez un ordinateur facilement accessible du pneu. Mesurer la résistance au niveau du connecteur entre les fils CAN bas et haut.
Note!
Toutes les voitures ne disposent pas d'une résistance de terminaison sur le bus CAN. Vous pouvez vérifier la présence de la résistance de terminaison intégrée sur le véhicule connecté à l'aide du schéma de câblage approprié.
Le bus CAN ne fonctionne pas
Si le bus de données K-CAN ou PT-CAN ne fonctionne pas, il peut y avoir un court-circuit ou un câble CAN haut ou bas cassé. Ou un calculateur défectueux.
Pour localiser la cause du défaut, il est recommandé de procéder comme suit:
- Déconnectez les abonnés du bus CAN à tour de rôle jusqu'à trouver un bloc qui est à l'origine du dysfonctionnement (= ECU X).
- Vérifiez que les câbles de l’ordinateur X ne sont pas court-circuités ou ouverts.
- Si possible, vérifiez l'ECU X.
- Une telle séquence d'actions ne peut aboutir que si le court-circuit comporte un fil vérifiable reliant l'ordinateur au bus CAN. Si le fil dans le bus CAN est lui-même court-circuité, vous devez vérifier le faisceau de câbles.
Nous nous réservons le droit aux erreurs typographiques, aux erreurs sémantiques et aux modifications techniques.